NASA JPL reports on what the Curiosity rover will be up to next:
Crystal-Rich Rock ‘Mojave’ is Next Mars Drill Target
A rock target where NASA’s Curiosity Mars rover is using its sample-collection drill this week may have a salty story to tell.

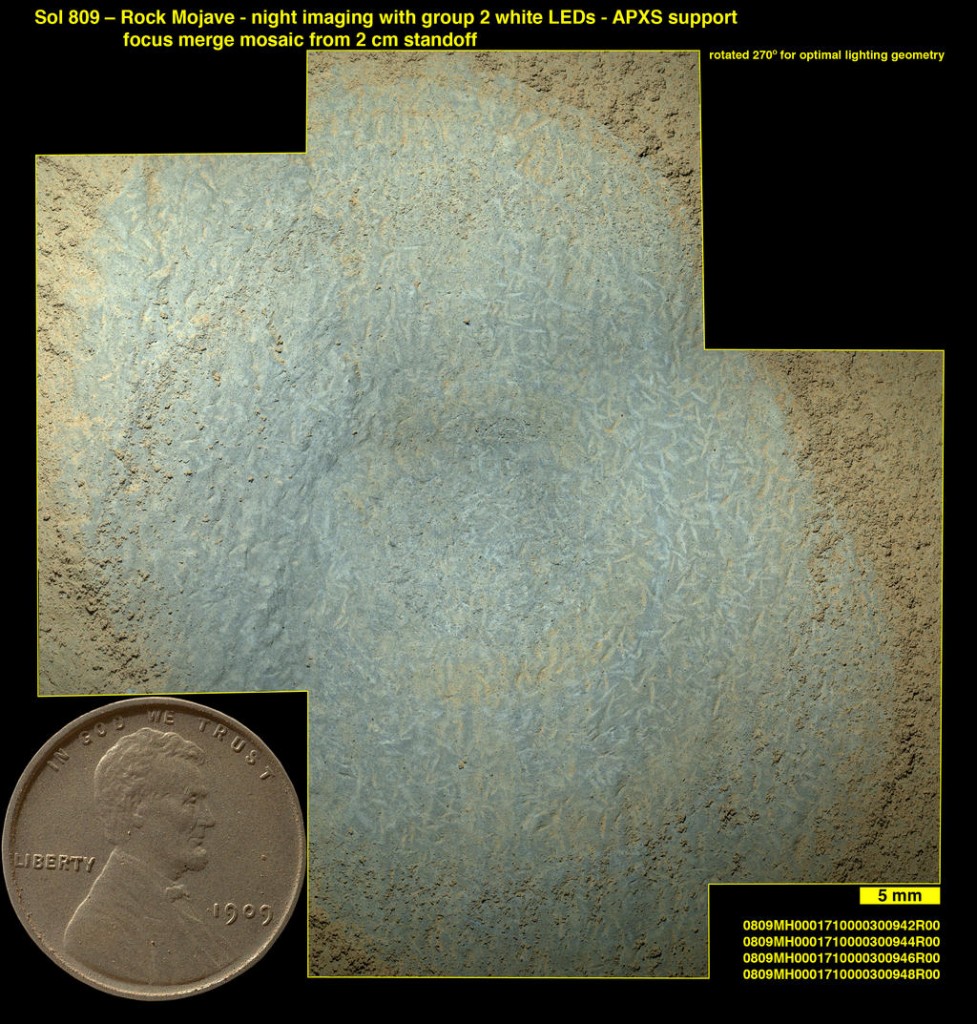
This view from the Mars Hand Lens Imager (MAHLI) camera on the arm of NASA’s Curiosity Mars rover shows some of the outcome from a shallow-depth, mini-drill test to assess whether a rock target called “Mojave” is appropriate for full-depth drilling to collect a sample. It was taken on Jan. 13, 2015, during the 867th Martian day, or sol, of Curiosity’s work on Mars. [Continue…]
This target, called “Mojave,” displays copious slender features, slightly smaller than grains of rice, that appear to be mineral crystals. A chance to learn their composition prompted the Curiosity science team to choose Mojave as the next rock-drilling target for the 29-month-old mission investigating Mars’ Gale Crater. The features might be a salt mineral left behind when lakewater evaporated.
This week, Curiosity is beginning a “mini-drill” test to assess the rock’s suitability for deeper drilling, which collects a sample for onboard laboratory analysis.
A week long pause in science operations to install a new version of rover flight software is scheduled to begin early next week, possibly before completion of the drilling and sample delivery. This is the fourth new version of the onboard software since the rover’s August 2012 landing.
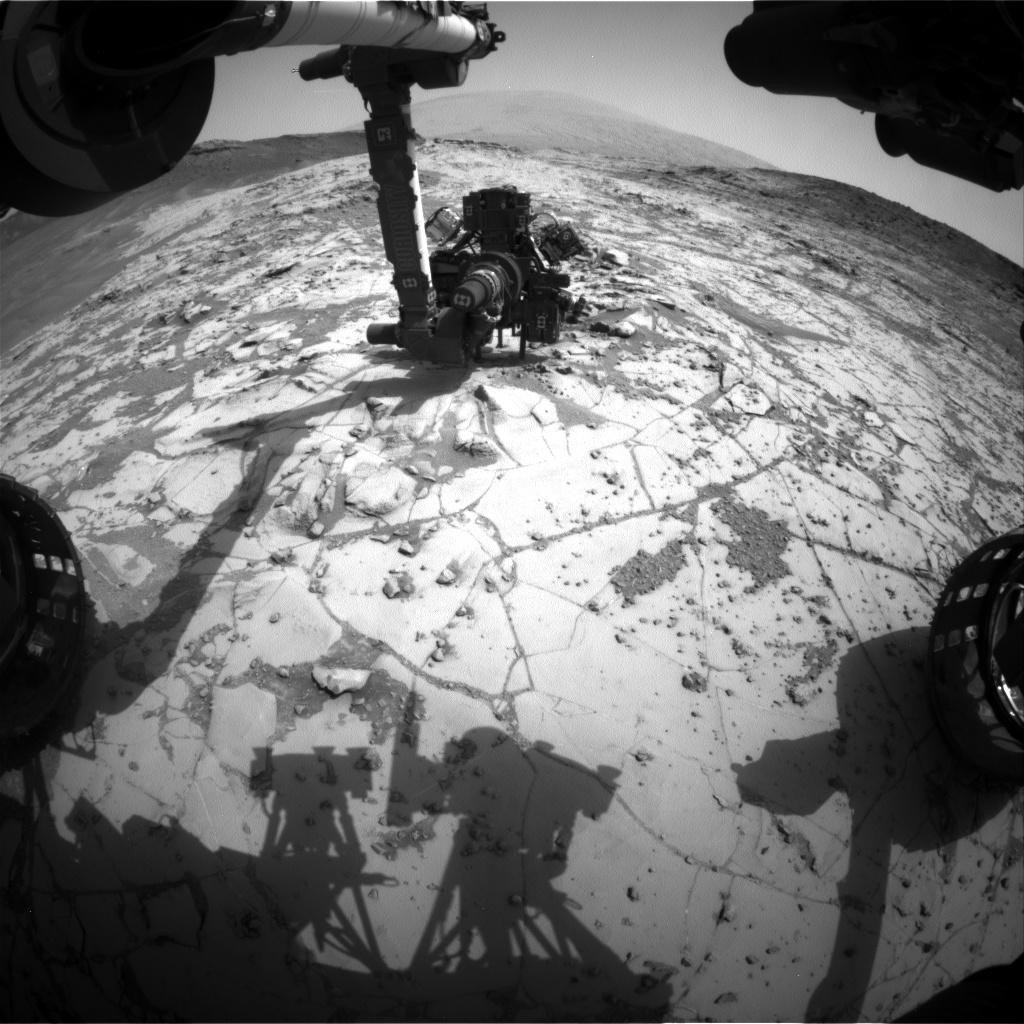
This view from the wide-angle Hazard Avoidance Camera (Hazcam) on the front of NASA’s Curiosity Mars Rover shows the rover’s drill in position for a mini-drill test to assess whether a rock target called “Mojave” is appropriate for full-depth drilling to collect a sample. It was taken on Jan. 13, 2015, during the 867th Martian day, or sol, of Curiosity’s work on Mars. [Continue…]
The Mojave drilling begins Curiosity’s third round of investigating the basal layer of Mount Sharp exposed at an area called “Pahrump Hills.” In the first round, the rover drove about 360 feet (110 meters) and scouted sites ranging about 30 feet (9 meters) in elevation. Then it followed a similar path, investigating selected sites in more detail. That second pass included inspection of Mojave in November 2014 with the dust-removal brush, close-up camera and Alpha Particle X-Ray Spectrometer on the rover’s arm. The results put Mojave at the head of the list of targets for the rover’s most intensive inspection, using laboratory instruments that ingest powdered rock collected by the drill.
“The crystal shapes are apparent in the earlier images of Mojave, but we don’t know what they represent,” said Curiosity Project Scientist Ashwin Vasavada at NASA’s Jet Propulsion Laboratory, Pasadena, California. “We’re hoping that mineral identifications we get from the rover’s laboratory will shed more light than we got from just the images and bulk chemistry.”
Curiosity’s Chemistry and Mineralogy instrument, or CheMin, can identify specific minerals in rock powder from a drilled sample. Analysis of the drill hole and drill tailings may also reveal whether the crystals are only at the surface, like a salty crust, or are also deeper in the rock.
“There could be a fairly involved story here,” Vasavada said. “Are they salt crystals left from a drying lake? Or are they more pervasive through the rock, formed by fluids moving through the rock? In either case, a later fluid may have removed or replaced the original minerals with something else.”
Curiosity’s work at Pahrump Hills may include drilling one or more additional rocks before heading to higher layers of Mount Sharp.
Next week’s planned software revision, like the mission’s earlier ones, adds protections against vulnerabilities identified in rover testbed activities on Earth. It also adds improvements to make planning drives more efficient.
“The files have already been uplinked and are sitting in the rover’s file system to be ready for the installation,” said JPL’s Danny Lam, the deputy engineering operations chief leading the upgrade process.
One change in the new software is to enable use of the rover’s gyroscope-containing “inertial measurement unit” at the same time as the rover’s drill, for better capability to sense slippage of the rover during a drilling operation. Another is a set of improvements to the rover’s ability to autonomously identify and drive in good terrain.
NASA’s Mars Science Laboratory Project is using Curiosity to assess ancient habitable environments and major changes in Martian environmental conditions. JPL, a division of the California Institute of Technology in Pasadena, built the rover and manages the project for NASA’s Science Mission Directorate in Washington.
For more information about Curiosity, visit: www.nasa.gov/msl and mars.jpl.nasa.gov/msl/
You can follow the mission on Facebook and Twitter at: www.facebook.com/marscuriosity and www.twitter.com/marscuriosity
![pia19106-mro-beagle-wide[1]](http://hobbyspace.com/Blog/wp-content/uploads/2015/01/pia19106-mro-beagle-wide1.jpg)