Here’s an entertaining intro to Planetary Resources and their ARKYD Space Telescope Kickstarter campaign:
As of the moment, the campaign has reached 9,307 backers $844,397 pledged of $1,000,000 goal .
Here’s an entertaining intro to Planetary Resources and their ARKYD Space Telescope Kickstarter campaign:
As of the moment, the campaign has reached 9,307 backers $844,397 pledged of $1,000,000 goal .
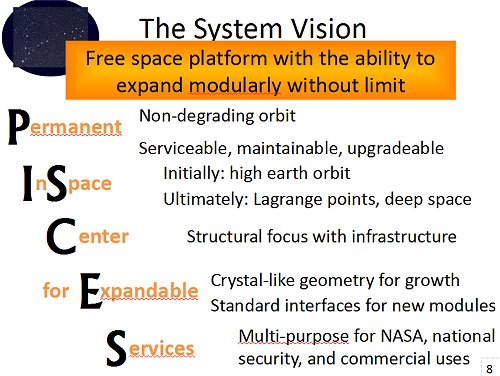
The latest presentation to the Future In-Space Operations (FISO) study group is now posted in the FISO Working Group Presentations Archive. Both slides (pptx) and audio (mp3) are available for the talk, PISCES: Settling the Near Space Frontier, Doris Hamill, NASA LaRC – June 5, 2013.
The latest presentation to the Future In-Space Operations (FISO) study group is now posted in the FISO Working Group Presentations Archive. The slides and videos (zip) and audio (mp3) are available for the talk, METERON and its Related Robotics Technologies at ESA Telerobotics & Haptics Lab – Part 2, André Schiele , Delft Univ of Technology & ESA/ESTEC – May 29, 2013.
A zip file is used this time since the
presentation by André Schiele includes a pdf, and a set of 8 short mp4 videos. When you open the pdf, you will be pointed to these videos (by number, as in “Video1 – EXARM / PA10 Telerobotics Workcell”) which you can open by clicking on the mp4 file by that name, OR by calling them up by clicking on the YouTube link on the page, if you happen to be internet-connected. These videos will NOT automatically launch in the pdf document.
Here are a couple of the videos from the TeleroboticsLab YouTube channel:
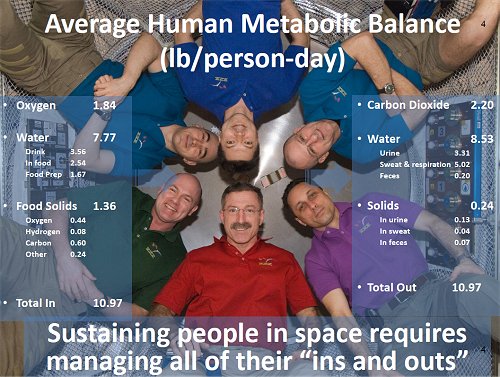
The latest presentation to the Future In-Space Operations (FISO) study group is now posted in the FISO Working Group Presentations Archive. Both slides (pdf) and audio (mp3) are available for the talk, Environmental Control and Life Support Systems: Current Status and Future Development, Robert Bagdigian & Robyn Carrasquillo – NASA MSFC – May.22.2013.
NASA is holding the Lunabotics Mining Competition at the Kennedy Space Center Visitor Complex this week.
The Lunabotics Mining Competition is a university-level competition designed to engage and retain students in science, technology, engineering and mathematics (STEM). There is particular relevance to NASA’s recently announced mission to find an asteroid by 2016 and then bring it to Cis-Lunar space, the technology concepts developed by the university teams for this competition conceivably could be used to mine resources on Asteroids as well as Mars. Robotic miners, just like these, will allow us to take samples at the returned Asteroid and give us valuable information to prepare for other deep space missions.
The challenge is for students to design and build a remote controlled or autonomous excavator that can collect and deposit a minimum of 10 kilograms of regolith simulant (aggregate) within 10 minutes. Regolith exists not only on Earth’s moon, but also on most planetary bodies such as Asteroids, Moons of Mars and Mars itself.
The complexities of the challenge include the abrasive characteristics of the simulant, the weight and size limitations of the robot, and the ability to control it from a remote control center. The scoring for the mining category will require teams to consider a number of design operation factors such as dust tolerance and projection, communications, vehicle mass, energy/power required, and full autonomy.
Here is a video in which the camera for the first half wanders around the event hall showing the student teams preparing their lunar mining robots for the contest. The second half shows the robots in the lunar simulant arena: