The brightest spots on the dwarf planet Ceres gleam with mystery in new views delivered by NASA’s Dawn spacecraft. These closest-yet views of Occator crater, with a resolution of 450 feet (140 meters) per pixel, give scientists a deeper perspective on these very unusual features.
This image, made using images taken by NASA’s Dawn spacecraft, shows Occator crater on Ceres, home to a collection of intriguing bright spots. The bright spots are much brighter than the rest of Ceres’ surface, and tend to appear overexposed in most images. This view is a composite of two images of Occator: one using a short exposure that captures the detail in the bright spots, and one where the background surface is captured at normal exposure. The images were obtained by Dawn during the mission’s High Altitude Mapping Orbit (HAMO) phase, from which the spacecraft imaged the surface at a resolution of about 450 feet (140 meters) per pixel. Larger imageThe new up-close view of Occator crater from Dawn’s current vantage point reveals better-defined shapes of the brightest, central spot and features on the crater floor. Because these spots are so much brighter than the rest of Ceres’ surface, the Dawn team combined two different images into a single composite view — one properly exposed for the bright spots, and one for the surrounding surface.
Scientists also have produced animations that provide a virtual fly-around of the crater, including a colorful topographic map.
Dawn scientists note the rim of Occator crater is almost vertical in some places, where it rises steeply for 1 mile (nearly 2 kilometers).
Views from Dawn’s current orbit, taken at an altitude of 915 miles (1,470 kilometers), have about three times better resolution than the images the spacecraft delivered from its previous orbit in June, and nearly 10 times better than in the spacecraft’s first orbit at Ceres in April and May.
“Dawn has transformed what was so recently a few bright dots into a complex and beautiful, gleaming landscape,” said Marc Rayman, Dawn’s chief engineer and mission director based at NASA’s Jet Propulsion Laboratory, Pasadena, California. “Soon, the scientific analysis will reveal the geological and chemical nature of this mysterious and mesmerizing extraterrestrial scenery.”
The spacecraft has already completed two 11-day cycles of mapping the surface of Ceres from its current altitude, and began the third on Sept. 9. Dawn will map all of Ceres six times over the next two months. Each cycle consists of 14 orbits. By imaging Ceres at a slightly different angle in each mapping cycle, Dawn scientists will be able to assemble stereo views and construct 3-D maps.
Dawn is the first mission to visit a dwarf planet, and the first to orbit two distinct solar system targets. It orbited protoplanet Vesta for 14 months in 2011 and 2012, and arrived at Ceres on March 6, 2015.
Dawn’s mission is managed by JPL for NASA’s Science Mission Directorate in Washington. Dawn is a project of the directorate’s Discovery Program, managed by NASA’s Marshall Space Flight Center in Huntsville, Alabama. UCLA is responsible for overall Dawn mission science. Orbital ATK Inc., in Dulles, Virginia, designed and built the spacecraft. The German Aerospace Center, Max Planck Institute for Solar System Research, Italian Space Agency and Italian National Astrophysical Institute are international partners on the mission team. For a complete list of mission participants, visit: dawn.jpl.nasa.gov/mission
More information about Dawn is available at the following sites:
Hopping, tumbling and flipping over are not typical maneuvers you would expect from a spacecraft exploring other worlds. Traditional Mars rovers, for example, roll around on wheels, and they can’t operate upside-down. But on a small body, such as an asteroid or a comet, the low-gravity conditions and rough surfaces make traditional driving all the more hazardous.
Enter Hedgehog: a new concept for a robot that is specifically designed to overcome the challenges of traversing small bodies. The project is being jointly developed by researchers at NASA’s Jet Propulsion Laboratory in Pasadena, California; Stanford University in Stanford, California; and the Massachusetts Institute of Technology in Cambridge.
While a Mars rover can’t operate upside down, the Hedgehog robot can function regardless of which side lands up. Credit: NASA/JPL-Caltech/Stanford“Hedgehog is a different kind of robot that would hop and tumble on the surface instead of rolling on wheels. It is shaped like a cube and can operate no matter which side it lands on,” said Issa Nesnas, leader of the JPL team.
The basic concept is a cube with spikes that moves by spinning and braking internal flywheels. The spikes protect the robot’s body from the terrain and act as feet while hopping and tumbling.
“The spikes could also house instruments such as thermal probes to take the temperature of the surface as the robot tumbles,” Nesnas said.
Two Hedgehog prototypes — one from Stanford and one from JPL — were tested aboard NASA’s C-9 aircraft for microgravity research in June 2015. During 180 parabolas, over the course of four flights, these robots demonstrated several types of maneuvers that would be useful for getting around on small bodies with reduced gravity. Researchers tested these maneuvers on different materials that mimic a wide range of surfaces: sandy, rough and rocky, slippery and icy, and soft and crumbly.
“We demonstrated for the first time our Hedgehog prototypes performing controlled hopping and tumbling in comet-like environments,” said Robert Reid, lead engineer on the project at JPL.
Hedgehog’s simplest maneuver is a “yaw,” or a turn in place. After pointing itself in the right direction, Hedgehog can either hop long distances using one or two spikes or tumble short distances by rotating from one face to another. Hedgehog typically takes large hops toward a target of interest, followed by smaller tumbles as it gets closer.
‘Hedgehog’ Robots Hop, Tumble in Microgravity The Hedgehog robot, designed to explore the surfaces of comets and asteroids While a Mars rover can’t operate upside down, the Hedgehog robot can function regardless of which side lands up.NASA’s C-9 aircraft for microgravity research gave two Hedgehog prototypes The Hedgehog robot, designed to explore the surfaces of comets and asteroids, can perform a “tornado” maneuver to spin and launch itself from the surface. Credit: NASA/JPL-Caltech/StanfordDuring one of the experiments on the parabolic flights, the researchers confirmed that Hedgehog can also perform a “tornado” maneuver, in which the robot aggressively spins to launch itself from the surface. This maneuver could be used to escape from a sandy sinkhole or other situations in which the robot would otherwise be stuck.
The JPL Hedgehog prototype has eight spikes and three flywheels. It weighs about 11 pounds (5 kilograms) by itself, but the researchers envision that it could weigh more than 20 pounds (9 kilograms) with instruments such as cameras and spectrometers. The Stanford prototype is slightly smaller and lighter, and it has shorter spikes.
Both prototypes maneuver by spinning and stopping three internal flywheels using motors and brakes. The braking mechanisms differ between the two prototypes. JPL’s version uses disc brakes, and Stanford’s prototype uses friction belts to stop the flywheels abruptly.
“By controlling how you brake the flywheels, you can adjust Hedgehog’s hopping angle. The idea was to test the two braking systems and understand their advantages and disadvantages,” said Marco Pavone, leader of the Stanford team, who originally proposed Hedgehog with Nesnas in 2011.
“The geometry of the Hedgehog spikes has a great influence on its hopping trajectory. We have experimented with several spike configurations and found that a cube shape provides the best hopping performance. The cube structure is also easier to manufacture and package within a spacecraft,” said Benjamin Hockman, lead engineer on the project at Stanford.
The researchers are currently working on Hedgehog’s autonomy, trying to increase how much the robots can do by themselves without instructions from Earth. Their idea is that an orbiting mothership would relay signals to and from the robot, similar to how NASA’s Mars rovers Curiosity and Opportunity communicate via satellites orbiting Mars. The mothership would also help the robots navigate and determine their positions.
The construction of a Hedgehog robot is relatively low-cost compared to a traditional rover, and several could be packaged together for flight, the researchers say. The mothership could release many robots at once or in stages, letting them spread out to make discoveries on a world never traversed before.
Hedgehog is currently in Phase II development through the NASA Innovative Advanced Concepts (NIAC) Program, and is led by Pavone. The flight development and testing were supported by NASA’s Center Innovation Fund (CIF) and NASA’s Flight Opportunities Program (FOP), which were led by Nesnas. NIAC, CIF and FOP are programs in NASA’s Space Technology Mission Directorate, located at the agency’s headquarters in Washington. JPL is managed by the California Institute of Technology for NASA. Stanford University, MIT and JPL collaborate on the project.
For a complete list of the selected proposals and more information about NIAC, visit: www.nasa.gov/niac
For more information about the Space Technology Mission Directorate, visit: www.nasa.gov/spacetech
This ESA Euronews video reports on various Euro space news and then focuses on Rosetta mission to Comet 67P/Churyumov-Gerasimenko, , including the study of organic molecules:
The Rosetta Mission has been writing a new chapter in what we know about the formation of life. The ESA teams involved are now preparing for the last part of this amazing journey.
Comet Churyumov-Gerasimenko has recently reached the perihelion – that’s the closest point to the Sun in its six and a half year orbit. It’s an important scientific step – as increasing solar energy warms the comet’s frozen ices, turning them to gas and dust. To stay safe, Rosetta has been forced to move further from the comet.
The Rosetta mission has been extended by nine months – until September next year. It’s hoped this will further boost the enormous amount of data that’s already been collected.
a dramatic outburst from Comet 67P/Churyumov-Gerasimenko, [it] was taken by Rosetta’s NAVCAM on 22 August 2015, about 336 km from the nucleus.
This single frame Rosetta navigation camera image of Comet 67P/Churyumov-Gerasimenko was taken on 22 August 2015 from a distance of 336 km from the comet centre. The image has a resolution of 28.6 m/pixel and measures 29.3 km across. The comet reached the closest point to the Sun along its 6.5-year orbit, or perihelion, on 13 August 2015. The comet’s activity, at its peak intensity around perihelion and in the weeks that follow, is clearly visible in the image, including a significant outburst. Larger imageMore about the image:
The image scale is 28.6 m/pixel and the image measures 29.3 km across. Although the activity is extraordinarily bright even in the original (below), the image above has been lightly enhanced to give a better view of the outline of the nucleus in the lower part of the image, as well as to show the full extent of the activity.
In this view, the comet is oriented with the large lobe up, revealing the Imhotep region as well as parts of Ash to the left, Aten at the centre (close to the edge and partly in shade), and Khepry to the right. The outburst seems to originate from a patch of the comet’s surface between Imhotep and Khepry.
The smaller lobe can be seen in the lower right part of the image, where indications of the ongoing activity over much of the comet can also be seen.
Comet 67P/C-G made its closest approach to the Sun, or perihelion, on 13 August 2015, just nine days before this image was taken. Based on observations made during previous passages of the comet through the inner solar system, scientists expect the activity to remain high for several weeks after perihelion, and the comet is likely to produce more of these sudden outbursts and peaks of activity.
The science instruments on Rosetta have also observed these outbursts and the teams are busy analysing the data to understand the nature of these events. These in-situ measurements are being complemented by astronomical observations from ground-based and near-Earth telescopes to try and understand the global impact of these events on the much larger coma of 67P/C-G
The closest-yet views of Ceres, delivered by NASA’s Dawn spacecraft, show the small world’s features in unprecedented detail, including Ceres’ tall, conical mountain; crater formation features and narrow, braided fractures.
NASA’s Dawn spacecraft spotted this tall, conical mountain on Ceres from a distance of 915 miles (1,470 kilometers). The mountain, located in the southern hemisphere, stands 4 miles (6 kilometers) high. Its perimeter is sharply defined, with almost no accumulated debris at the base of the brightly streaked slope with bright streaks. The image was taken on August 19, 2015. The resolution of the image is 450 feet (140 meters) per pixel. Full res jpeg.“Dawn is performing flawlessly in this new orbit as it conducts its ambitious exploration. The spacecraft’s view is now three times as sharp as in its previous mapping orbit, revealing exciting new details of this intriguing dwarf planet,” said Marc Rayman, Dawn’s chief engineer and mission director, based at NASA’s Jet Propulsion Laboratory, Pasadena, California.
At its current orbital altitude of 915 miles (1,470 kilometers), Dawn takes 11 days to capture and return images of Ceres’ whole surface. Each 11-day cycle consists of 14 orbits. Over the next two months, the spacecraft will map the entirety of Ceres six times.
NASA’s Dawn spacecraft took this image that shows a mountain ridge, near lower left, that lies in the center of Urvara crater on Ceres. Urvara is an Indian and Iranian deity of plants and fields. The crater’s diameter is 101 miles (163 kilometers). This view was acquired on August 19, 2015, from a distance of 915 miles (1,470 kilometers). The resolution of the image is 450 feet (140 meters) per pixel. Full res jpeg.The spacecraft is using its framing camera to extensively map the surface, enabling 3-D modeling. Every image from this orbit has a resolution of 450 feet (140 meters) per pixel, and covers less than 1 percent of the surface of Ceres.
At the same time, Dawn’s visible and infrared mapping spectrometer is collecting data that will give scientists a better understanding of the minerals found on Ceres’ surface.
NASA’s Dawn Spacecraft took this image of Gaue crater, the large crater on the bottom, on Ceres. Gaue is a Germanic goddess to whom offerings are made in harvesting rye. The center of this crater is sunken in. Its diameter is 84 kilometers (52 miles). The resolution of the image is 450 feet (140 meters) per pixel. The image was taken from a distance of 915 miles (1,470 kilometers) on August 18, 2015. Full res jpeg.Engineers and scientists will also refine their measurements of Ceres’ gravity field, which will help mission planners in designing Dawn’s next orbit — its lowest — as well as the journey to get there. In late October, Dawn will begin spiraling toward this final orbit, which will be at an altitude of 230 miles (375 kilometers).
Dawn is the first mission to visit a dwarf planet, and the first to orbit two distinct solar system targets. It orbited protoplanet Vesta for 14 months in 2011 and 2012, and arrived at Ceres on March 6, 2015.
This pair of images shows color-coded maps from NASA’s Dawn mission, revealing the highs and lows of topography on the surface of dwarf planet Ceres. The map at left is centered on terrain at 60 degrees east longitude; the map at right is centered on 240 degrees east longitude. The color scale extends about 5 miles (7.5 kilometers) below the surface in indigo to 5 miles (7.5 kilometers) above the surface in white. The topographic map was constructed from analyzing images from Dawn’s framing camera taken from varying sun and viewing angles. The map was combined with an image mosaic of Ceres and projected as an orthographic projection. The well-known bright spots in the center of Ceres northern hemisphere in the image at right retain their bright appearance, although they are color-coded in the same green elevation of the crater floor in which they sit. Full res jpeg.Dawn’s mission is managed by JPL for NASA’s Science Mission Directorate in Washington. Dawn is a project of the directorate’s Discovery Program, managed by NASA’s Marshall Space Flight Center in Huntsville, Alabama. UCLA is responsible for overall Dawn mission science. Orbital ATK Inc., in Dulles, Virginia, designed and built the spacecraft. The German Aerospace Center, Max Planck Institute for Solar System Research, Italian Space Agency and Italian National Astrophysical Institute are international partners on the mission team. For a complete list of mission participants, visit: dawn.jpl.nasa.gov/mission
More information about Dawn is available at the following sites:
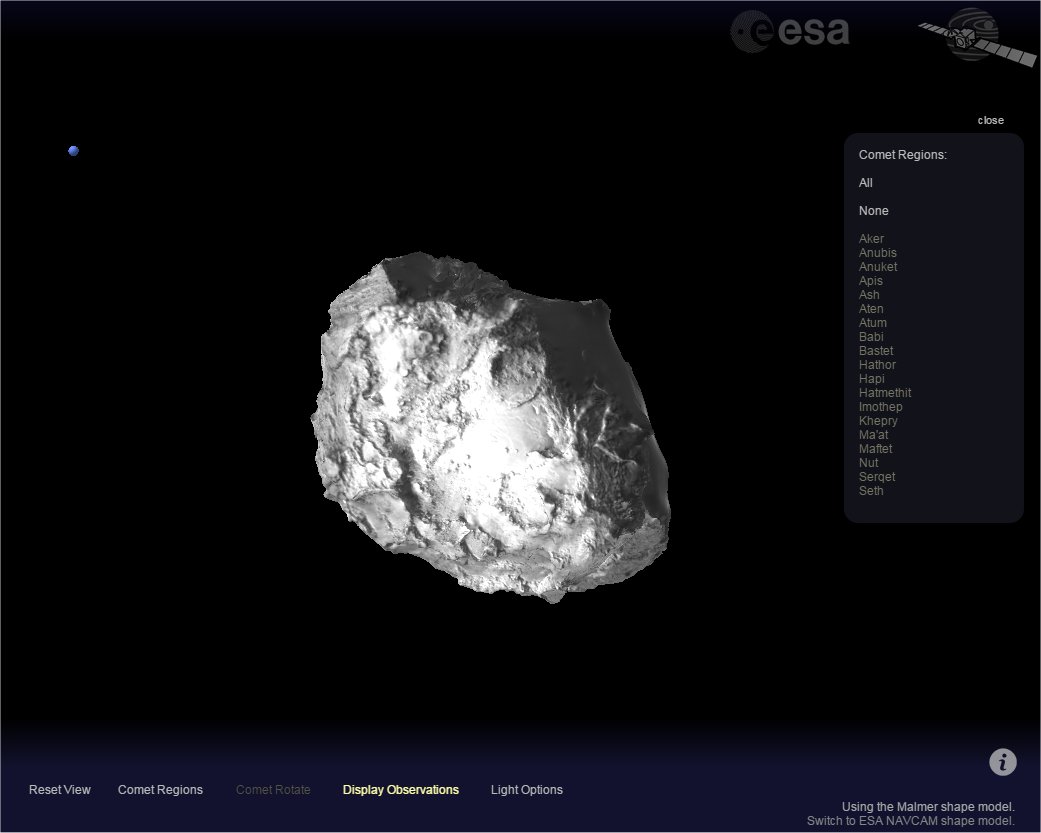
Check out this cool Rosetta Comet Viewer Tool at ESA, which was originally developed by Swedish space enthusiast and image processing expert Mattias Malmer. He took images of Comet 67P/C-G from the Rosetta probe and combined them in a way that lets the user rotate, zoom-in and out from, and highlight particular areas on the comet.
![pia19889[1]](http://hobbyspace.com/Blog/wp-content/uploads/2015/09/pia198891.jpg)
![tech2015090[1]](http://hobbyspace.com/Blog/wp-content/uploads/2015/09/tech20150901.jpg)
![tech20150903b-16[1]](http://hobbyspace.com/Blog/wp-content/uploads/2015/09/tech20150903b-161.gif)
![Comet_on_22_August_2015_NavCam_node_full_image_2[1]](http://blogs.esa.int/rosetta/files/2015/08/ESA_Rosetta_NavCam_20150822.jpg)
![PIA19631-640x350[1]](http://hobbyspace.com/Blog/wp-content/uploads/2015/08/PIA19631-640x3501.jpg)
![PIA19632-640x350[1]](http://hobbyspace.com/Blog/wp-content/uploads/2015/08/PIA19632-640x3501.jpg)
![PIA19633-640x350[1]](http://hobbyspace.com/Blog/wp-content/uploads/2015/08/PIA19633-640x3501.jpg)
![PIA19607-640x350[1]](http://hobbyspace.com/Blog/wp-content/uploads/2015/08/PIA19607-640x3501.jpg)